24h Safe Campus: Unmanned vehicle patrol system in HKUST (GZ)

Project Team
Project Manager
Prof. Kai Zhang
Project Supervisor
Prof. Jinni Zhou
RBM 1st Cohort
Academic Supervisor(s)
Team members
Kai ZHANG, Chengyang LI, Guoyang ZHAO, Yujie ZHOU, Mandan CHAO
Project Summary
Background
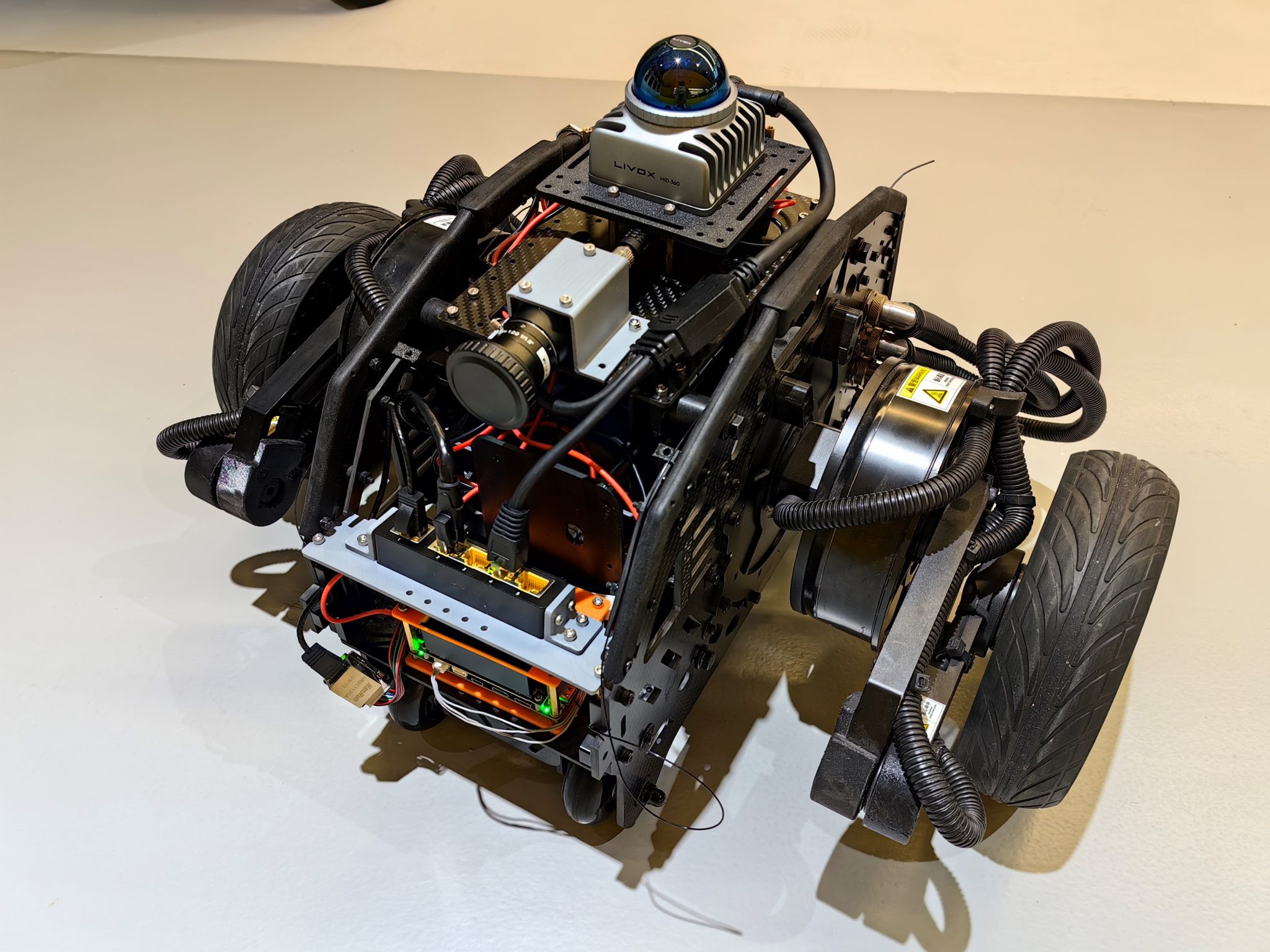
Unmanned patrol vehicles represent a significant advancement in the field of security and surveillance. These systems are designed to operate without direct human intervention, by leveraging sophisticated automation technologies. The development of Unmanned patrol vehicles addresses the growing need for efficient, continuous, and reliable surveillance in various settings. By reducing the reliance on human patrols, these vehicles enhance safety, reduce operational costs, and provide real-time data collection and analysis.
Methods and Techonology
Localization and Mapping - Use multi-modal sensor data to generate motion estimation and a 3D map of the environment.
Perception - Use deep learning to interpret the environment and recognize objects.Planning and Control - Make the robot move without collision.
Group Deliverables
All members of the group obtained extensive training from hands-on hardware and software development of an autonomous vehicle. We have practically expereinced a long-term team project involving the application of a large range of skill set and knowledge discipline.